


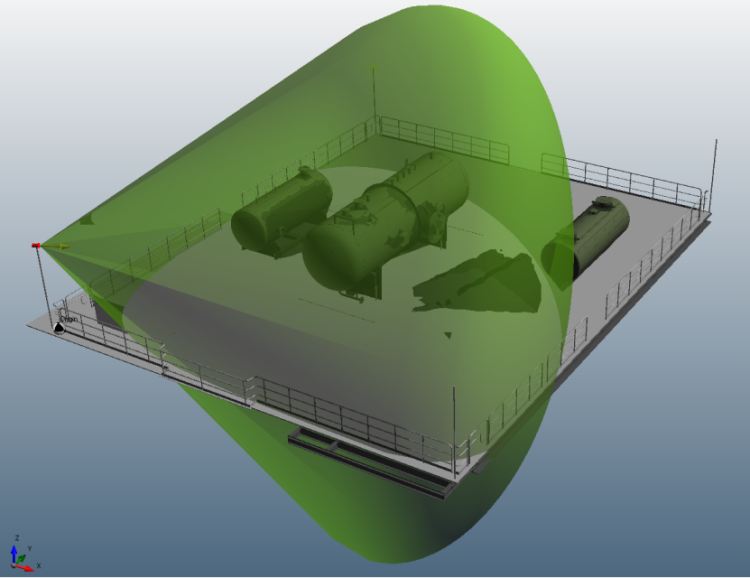
图1 空间分析法示意图
空间分析法的评估步骤如下:
a)目标定义:目标是装置中需要被保护的对象以及对象的属性,例如压缩机等设备。
b)确定风险层:按照一定的距离,生成环绕覆盖危险源的风险层。风险层可以分成不同的等级,每个等级对应特定的距离。
c)探测器布局:配置保护目标周围的探测器数量、位置、类型、角度以及探测器参数。
d)几何计算:通过算法公式计算出探测器对风险层的覆盖率,给出优化方案。
二、场景分析法
根据探测器参数,结合设备及建/构筑物布置、释放源的理化特性、泄漏频率和空气流动等特点,采用数值模拟及计算机辅助分析方法确定探测器在工厂下的场景覆盖率。场景分析法侧重于对气体探测器的设计布置分析,其计算量大,实际执行时有一定的挑战性。场景分析法的优点是精确性高,直接针对目标气体,优化后的探测器配置方案包括探测器数量和布置都会更贴近于实际工况。场景分析法适用于可燃气体探测器和有毒气体探测器。
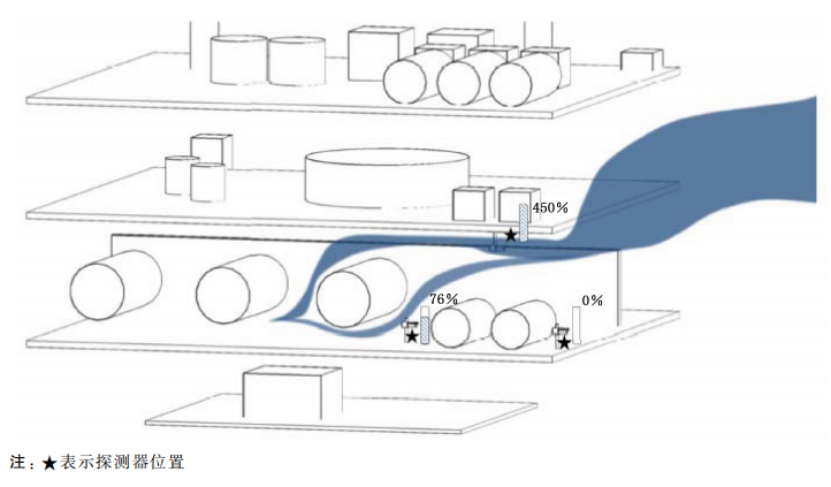
图2 场景分析法示意图
场景分析法的评估步骤如下:
a)区域定义和目标气体定义:智能工厂通常由多个不同功能的装置区组成,这些装置区的物理位置不同,工艺流程有差异,产生的危险源也不同。所以,在开始分析之前,应综合考虑区域的物理位置和危险源种类,将工厂分为独立的区域,并明确需要探测的泄漏气体种类。
b)环境定义:不同地区气候参数有差异,因此需要收集所评估地区的气温、气压、风向和风速等数据。
c)泄漏定义:定义泄漏点、泄漏介质、泄漏量等参数。
d)场景定义及CFD气云计算:计算特定环境的特定泄漏场景下,产生气云的分布情况。
e)探测器布局:配置保护目标周围的探测器数量、位置、类型、报警阈值及探测器参数。
f)分析计算:计算出气体浓度和气体探测器报警阈值的对比,得出探测器覆盖率,给出优化方案。
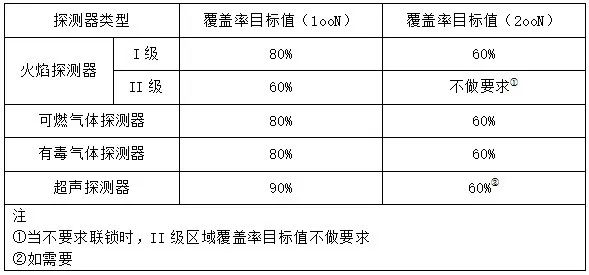
无论使用空间分析法还是场景分析法进行探测器布局监测的有效性评估,探测器的覆盖率都需要达到一定的目标,才能保证预防人员伤亡、保证工厂的安全生产。根据《智能工厂-安全监测有效性评估方法》(GB/T 39173-2020),火焰探测器、可燃气体探测器、有毒气体探测器和超声探测器的目标覆盖率见下表:
表1 不同类型探测器的目标覆盖率

联系我们:
扫描左侧二维码添加联系方式。
